|
|
Title: Corrections to:“Accurate and Robust Object SLAM With 3D Quadric Landmark Reconstruction in Outdoors”
BibTex: (完整的BibTex)
@article{yeger2022corrections,
title={Corrections to:“Accurate and Robust Object SLAM With 3D Quadric Landmark Reconstruction in Outdoors”},
author={Yeger, Matan and Farhi, Elad I},
journal={IEEE Robotics and Automation Letters},
volume={7},
number={4},
pages={12209--12210},
year={2022},
publisher={IEEE}
}
Contributions:
修正Accurate and Robust Object SLAM With 3D Quadric Landmark Reconstruction in Outdoors中的一些错误
Methodology:
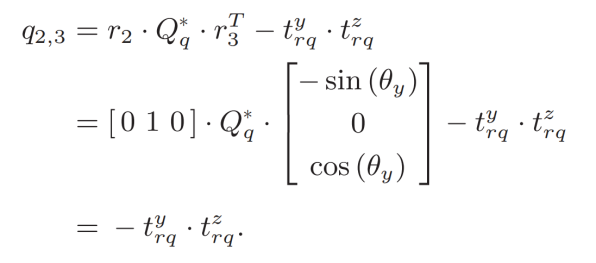
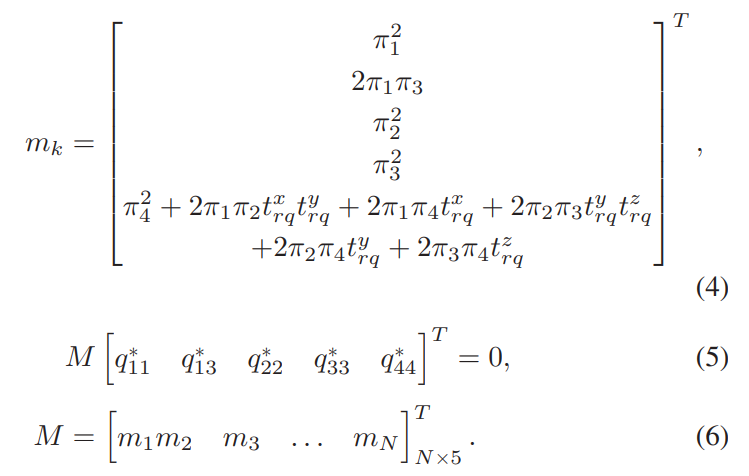
问题1:(3)式应该是一个对称矩阵

原文:
修正:
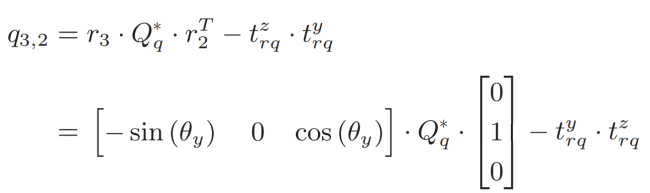
对比 q_{2,3} 和 q_{3,2}
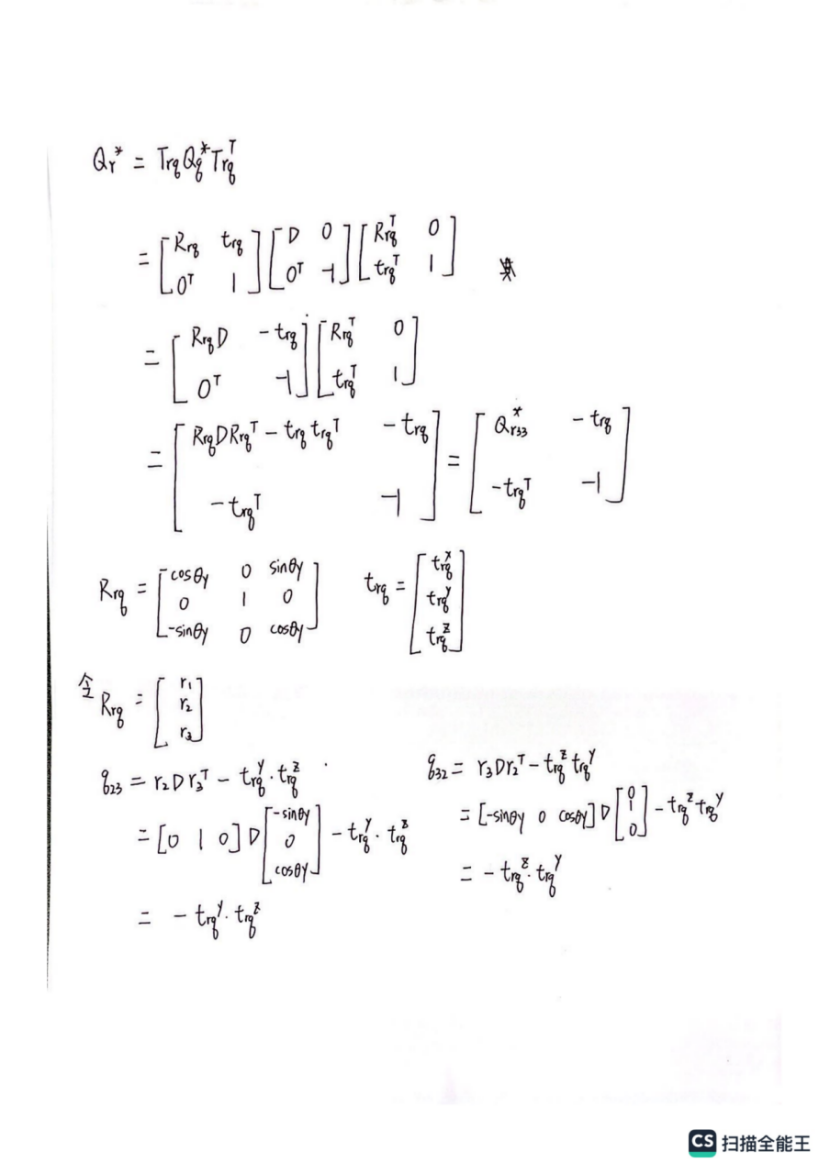
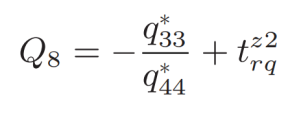
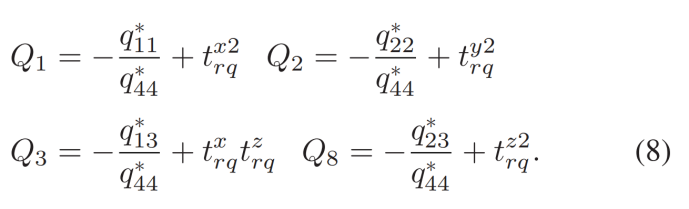
问题2: Q_8 计算错误
原文:
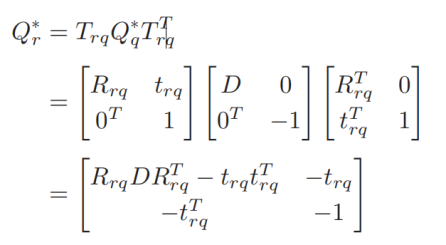
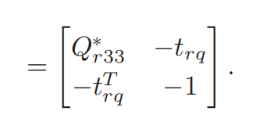
修正:得出 Q_8 的正确方程:
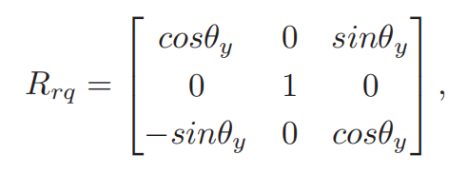
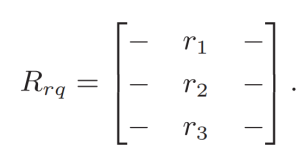
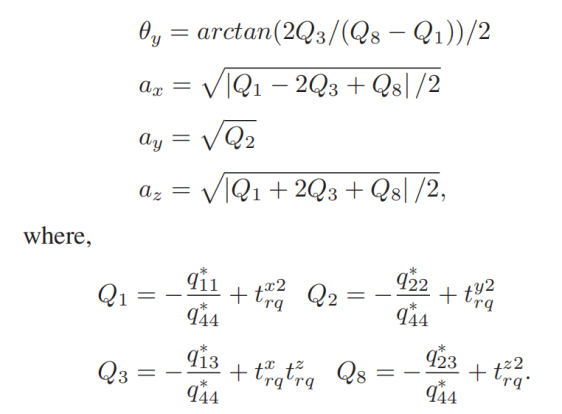
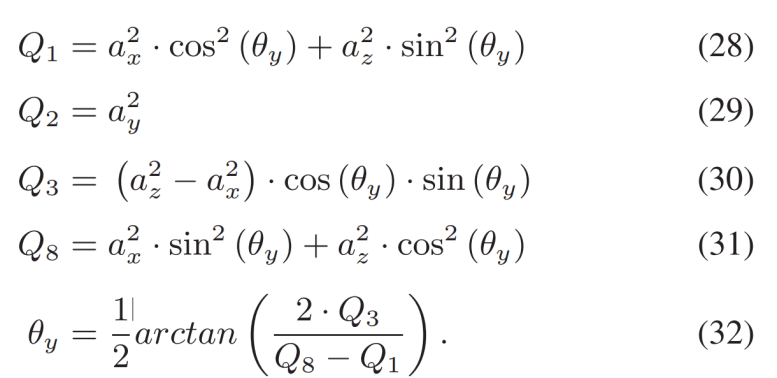
问题3: a_x 和 a_z 的计算错误(7)
原文:
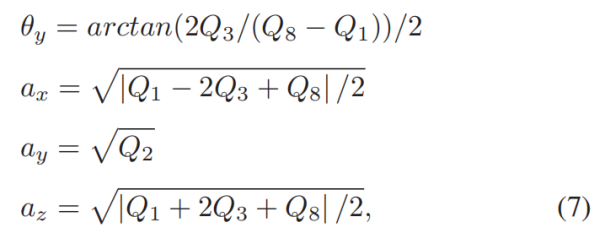
修正:
将修正后的(3)式代入修正后的(8)中,得:
提取二次曲面轴长

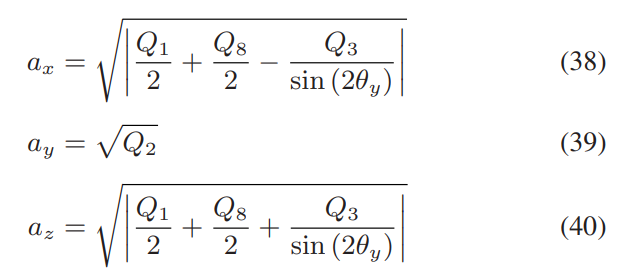
为了避免除以0,应满足
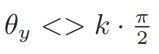
问题4:(7)式缺失边界条件
原文:
如上所述,当
时,(38)-(40)不成立。
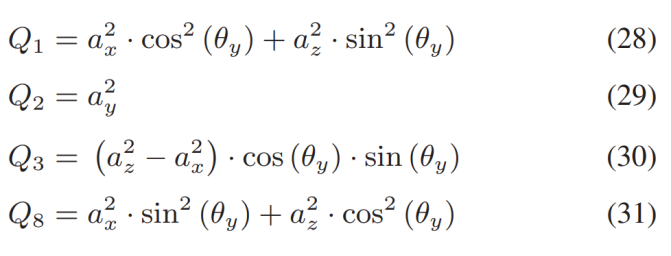
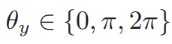
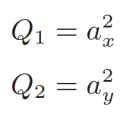
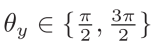
进行边界值分类讨论,分别代入(28)-(31)。
Case1:

Case2:
 |
|



 发表于 2023-1-18 13:14:34
发表于 2023-1-18 13:14:34